08. Linearized Model
Nd787 C5 L3 A07 L Linearized Model V3
Linearization
We've been using the following for our state vector:
And the non-linear equations of motion are:
We can write these equations more concisely and generally as some function of the current state and the controls:
We define a trim state x^ (and associated trim state controls u^) and a deviation from trim \bar{x} such that
This means that
Taking a Taylor series expansion, we can write this as
Where I've used \ldots to represent higher order terms in the Taylor expansion. Dropping these terms and canceling out the trim state, we find
Linearized Equations
It winds up being convenient to remove w from the state vector and replace it with the angle of attack \alpha. These variables are related:
When we work out the Jacobians of the resulting state vector, we get the following linearized equations of motion:
The 6 \times 6 matrix on the first line is the stability matrix. The 6 \times 2 matrix on the second line is the control-effect matrix.
Note that we've introduced some new coefficients in order to write these more compactly.
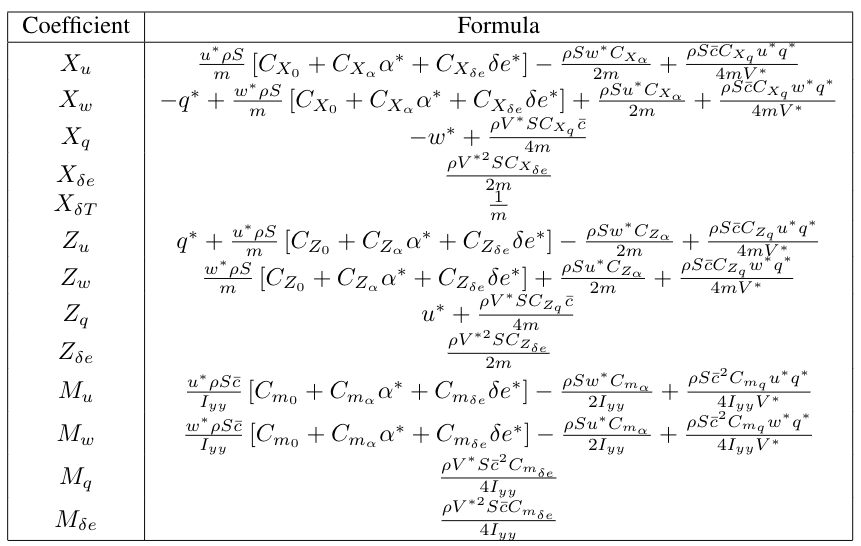
Remember: you can find all of these equations in the fixed wing cheat sheet.